遠心ブロワーの回転方法
あ 遠心送風機 外部電源、最も一般的には電気モーターによって駆動される回転インペラによって回転します。モーターは、ダイレクト シャフト カップリング、ベルトとプーリー システム、または可変周波数ドライブ (VFD) のいずれかを介して回転エネルギーをインペラに伝達します。 インペラは通常 1,000 ~ 3,600 RPM の範囲の速度で回転します 、軸方向に空気を引き込み、遠心力によって半径方向に排出します。
駆動方法はエネルギー効率、速度制御、メンテナンス要件、運用コストに直接影響するため、ブロワーの回転方法を理解することが重要です。間違ったドライブ構成を選択すると、システム効率が 10 ~ 30% 低下したり、コンポーネントの早期故障につながる可能性があります。
ブロワーを回すインペラの役割
インペラは、遠心ブロワーの回転コアです。回転すると、入口から入ってくる空気に速度が加わります。湾曲したブレードは空気を外側に加速し、空気が渦巻きケーシングを通って出るときに運動エネルギーを圧力に変換します。
インペラの設計は気流性能に直接影響します。 3 つの一般的なブレード構成が使用されます。
- 前方に湾曲したブレード: 低速でも高い気流を生成します。 HVAC アプリケーションでは一般的です。
- 後方に湾曲したブレード: より効率的で自己制限的な電力。工業用に好まれます。
- ラジアルブレード: 耐久性に優れ、高圧または粒子を多く含む気流に適しています。
インペラは単独では回転しません。システムの要求を満たすために必要なトルクと回転速度を提供する駆動機構に接続する必要があります。
遠心送風機を回す主な駆動方式
遠心送風機システムでは 3 つの主な駆動構成が使用されます。それぞれに異なる機械的構成があり、さまざまな動作条件に適しています。
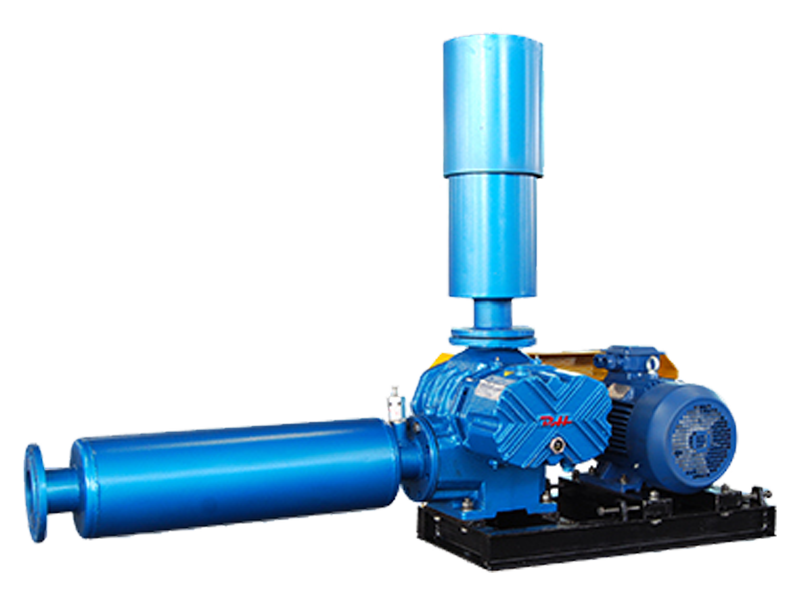
ダイレクトドライブ
ダイレクトドライブ構成では、インペラはモーターシャフトに直接取り付けられるか、剛性または柔軟なカップリングを介して接続されます。中間の送信要素はありません。この設定により、ベルトのスリップと伝達ロスがなくなり、 通常、ベルト駆動システムよりも効率が 2 ~ 5% 高い .
ダイレクトドライブブロワーはコンパクトで、交換するベルトがないためメンテナンスの必要が少なくなります。ただし、ブロワーの速度はモーターの速度に固定されており、標準的な誘導モーターの場合は通常 1,750 または 3,450 RPM です。速度調整には別のモーターまたは VFD が必要です。
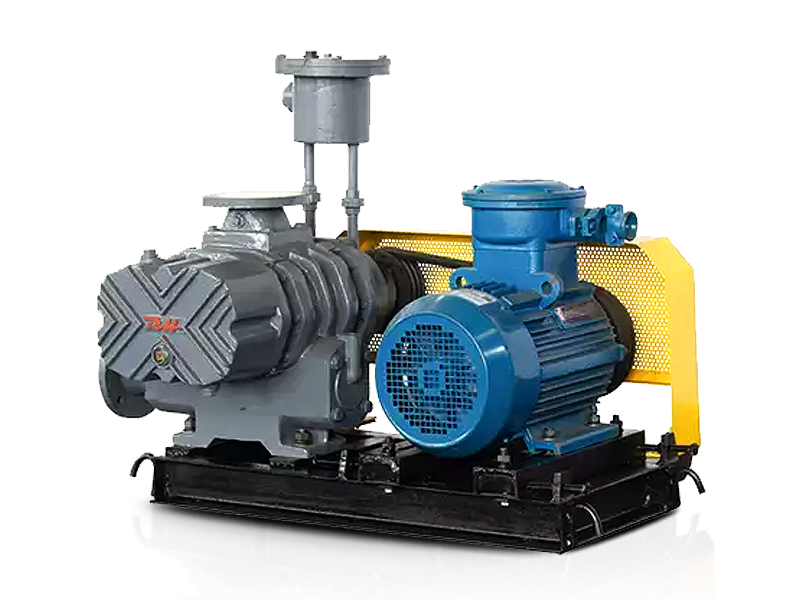
ベルトドライブ
ベルト ドライブ システムでは、1 つ以上の V ベルトまたはフラット ベルトを介してブロワー プーリーに接続されたモーター プーリーを使用します。プーリーの直径を変更することで、オペレーターはモーターを交換せずにインペラの速度を調整できます。この柔軟性により、ベルト ドライブは商用 HVAC および軽工業用途で最も一般的な構成となっています。
あ typical belt drive system operates at 93 ~ 97% の機械効率 適切に張られて調整されているとき。ベルトは定期的に検査する必要があります。ベルトが摩耗したり緩んだりすると、効率が 5 ~ 10% 低下し、騒音レベルが著しく増加する可能性があります。
可変周波数ドライブ (VFD)
あ VFD controls the AC frequency supplied to the motor, which in turn adjusts motor speed and, by extension, impeller speed. This is the most energy-efficient method for applications with variable airflow demand. Since fan power scales with the cube of speed, インペラの速度を 20% 下げると、エネルギー消費を 50% 近く削減できます。 .
VFD は現在、エネルギーコストが最優先される現代の産業用および商業用送風機の設置において標準となっています。また、ソフトスタートも可能になり、起動時のインペラやシャフトベアリングへの機械的ストレスが軽減されます。
駆動方式の比較: 実践的な概要
| ドライブの種類 | 速度の柔軟性 | 標準的な効率 | メンテナンスの必要性 | ベストユースケース |
|---|---|---|---|---|
| ダイレクトドライブ | 修正済み (VFD が追加されていない場合) | 高 (98-99%) | 低い | 定負荷システム |
| ベルトドライブ | あdjustable via pulleys | 中程度 (93-97%) | 中等度 | 空調設備、軽工業用 |
| VFD ダイレクトドライブ | 完全に可変 | 非常に高い (最大 97%) | 低い | 可変需要システム |
回転速度がブロワーの性能に与える影響
遠心ブロワーの性能は、速度の変化が気流、圧力、消費電力にどのような影響を与えるかを定義する一連の工学関係であるファン親和性の法則に従います。
- あirflow (CFM) 速度に正比例して変化します。速度も 2 倍、風量も 2 倍になります。
- 静圧 速度の二乗で変化します。速度が 2 倍になると圧力は 4 倍になります。
- 消費電力 速度の3乗で変化します。 2 倍の速度には 8 倍の電力が必要です。
たとえば、1,800 RPM で動作し 10 kW を消費するブロワーを 1,440 RPM (元の速度の 80%) に減速すると、消費電力はわずか 5.12kW 、49パーセント近く削減されました。これが、VFD がエネルギーを重視する施設で推奨される制御方法になっている理由です。
遠心ブロワーの駆動に一般的に使用されるモーターの種類
モーターはブロワーを回転させる主な動力源です。選択したモーターのタイプは、始動トルク、速度範囲、エネルギー効率、および制御システムとの互換性に影響します。
あC Induction Motors
遠心ブロワー用途で最も広く使用されているモータータイプ。 AC 誘導モーターは堅牢で低コストであり、分数馬力から数百キロワットまでの定格電力が用意されています。標準モデルは、60 Hz で 1,800 または 3,600 RPM の同期速度で動作します。速度制御のために VFD と組み合わせることができます。
永久磁石モーター
高効率ブロワーシステムでの使用が増えている永久磁石モーターは、 広い速度範囲にわたって 95% 以上の効率評価 。初期費用は高くなりますが、特に連続使用用途において長期的なエネルギーコストを大幅に削減します。
EC (電子整流) モーター
EC モーターは、小型の HVAC ブロワーやファン コイル ユニットに一般的で、制御電子機器をモーター アセンブリに直接統合します。これらは正確な速度制御を提供し、部分負荷で 85 ~ 92% の効率に達し、可変速動作において従来の AC モーターを上回ります。
回転の方向とそれが重要な理由
遠心ブロワーは、ドライブ側から見て時計回り (CW) または反時計回り (CCW) の特定の方向に回転するように設計されています。これは、インペラブレードの向きとボリュートケーシングの形状によって決まります。
ブロワーを間違った方向に回転させると、インペラが意図した空気流路に空気を押し込みます。多くの場合、これによってすぐにブロワーが損傷することはありませんが、次のような結果が生じます。 空気流量が大幅に減少し、多くの場合定格容量の 50% 未満になります。 、異常な音や振動が発生します。
三相モーターの設置で正しい回転を確認するために、簡単なバンプテストが実行されます。モーターに瞬間的に通電し、ブロワーハウジングにマークされた方向矢印に対してシャフトの回転を視覚的に確認します。回転が逆になった場合は、3 本の電源リードのうちのいずれか 2 本を交換して修正します。
適切なドライブ構成を決定する要素
正しい駆動方法を選択するには、いくつかの運用上および経済上の要因を評価する必要があります。
- あirflow variability: 需要が変動するシステムは、VFD 制御から最も恩恵を受けます。定容量システムでは、より単純なダイレクト ドライブまたはベルト ドライブを使用できます。
- 営業時間: ブロワーは年間 4,000 時間以上稼働しており、省エネにより VFD の初期費用が高くなります。
- 速度要件: 必要なインペラ速度が標準モーター速度と大幅に異なる場合、ベルトドライブを使用すると、カスタムモーターを調達せずに簡単に調整できます。
- スペースの制約: ダイレクト ドライブ システムはよりコンパクトで、ベルト ガード アセンブリが不要になります。
- メンテナンス能力: メンテナンス スタッフが限られている施設では、ベルトの張力調整、調整、交換の作業を避けるためにダイレクト ドライブ システムを好むことがよくあります。
ブロワーの回転方法に関連する一般的な問題
駆動システムの問題は、遠心ブロワーの性能低下の最も一般的な原因の 1 つです。主な問題には次のようなものがあります。
- ベルトの滑り: 速度低下や発熱の原因となります。適切に張られたベルトは、手の圧力が適度にかかると、ベルト スパン 1 フィートあたり約 1 インチたわむはずです。
- プーリーのミスアライメント: ベルトが不均一に摩耗し、ベアリング負荷が増加します。設置時およびモーター交換後には、ストレートエッジまたはレーザーツールを使用して位置合わせをチェックする必要があります。
- ベアリングの摩耗: ベアリングが摩耗すると、回転抵抗が増加し、振動が増加します。動作中にベアリング温度が華氏 200 度を超える場合は、通常、潤滑が不十分か過負荷であることを示します。
- VFD高調波: VFD の構成が不十分だと、電気高調波が発生し、モーター巻線が加熱される可能性があります。インバータ負荷定格モータはこれに対処するように設計されており、VFD を使用する場合は常に指定する必要があります。